- شرکت اندیشه تراشه ویرا
- دفتر تهران: 02176490358-09120613870
- دفتر مشهد: 05138554285-09155177027
- info@Tarashe.Net


نصب نرم افزار بخش دوم
27 اسفند 1399
نحوه پشتیبانی آنلاین
4 فروردین 1400
آموزش نصب و جانمایی دوربین تشخیص پلاک خوان بخش اول :
مطالب نوشته شده در رابطه با جانمایی دوربین پلاک خوان بر اساس تحقیقات بر روی یک عدد دوربین ip با حداکثر کیفیت 3 مگا پیکسل با خروجی تصویر H265 با قابلیت وریفوکال(زوم دستی) 3.6 به 12 میلیمتری ( زاویه دید 80 درجه فیکس و 25 درجه در زوم) میباشد.
سیستم مورد استفاده یک عدد لپ تاپ صنعتی با پردازنده i7 با کلاک پالس 3.7 گیگا هرتز با رم 8 گیگ و سیستم عامل 10 و 64 بیتی این آزمایش را انجام میدهیم.
-
شناسایی بهترین تنظیم برای دوربین:
در ابتدا برای شناسایی میزان اشغال بودن سی پی یو و تاخیر در ارسال تصویر آزمایش را انجام دادیم که خروجی بصورت جدول زیر بدست آمد:
رزولوشن |
تعداد فریم در ثانیه |
کیفیت تصویر |
درصد مصرف پردازنده |
تاخیر |
رضایت کلی |
زمان لازم برای شناسایی یکبار پلاک(میلی ثانیه) |
3M |
15 |
عالی |
65 |
1 |
غ ق[1] |
بعلت تاخیر بالا نیاز به محاسبه نبود |
3M |
15 |
معمولی |
58 |
0.4 |
ق ق[2] |
500 |
3M |
15 |
بد |
50 |
0.5 |
ق ق |
400 |
3M |
10 |
عالی |
61 |
0.4 |
ق ق |
380 |
3M |
10 |
معمولی |
54 |
0.4 |
ق ق |
320 |
3M |
10 |
بد |
53 |
1 |
غ ق |
بعلت تاخیر بالا نیاز به محاسبه نبود |
3M |
5 |
عالی |
47 |
2 |
غ ق |
بعلت تاخیر بالا نیاز به محاسبه نبود |
3M |
5 |
معمولی |
32 |
2 |
غ ق |
بعلت تاخیر بالا نیاز به محاسبه نبود |
3M |
3 |
بد |
30 |
3 |
غ ق |
بعلت تاخیر بالا نیاز به محاسبه نبود |
2M |
25 |
عالی |
54 |
2 |
غ ق |
بعلت تاخیر بالا نیاز به محاسبه نبود |
2M |
25 |
معمولی |
45 |
0.7 |
ق ق |
260 |
2M |
25 |
بد |
43 |
0.6 |
غ ق |
بعلت تاخیر بالا نیاز به محاسبه نبود |
2M |
15 |
عالی |
54 |
0.6 |
ق ق |
210 |
2M |
15 |
معمولی |
43 |
0.6 |
ق ق |
200 |
2M |
15 |
بد |
31 |
0.5 |
ق ق |
190 |
2M |
10 |
عالی |
44 |
0.9 |
ق ق |
200 |
2M |
10 |
معمولی |
47 |
0.5 |
ق ق |
175 |
2M |
10 |
بد |
48 |
0.5 |
ق ق |
150 |
1M |
15 |
عالی |
32 |
0.2 |
ق ق |
105 |
1M |
15 |
معمولی |
27 |
0.2 |
ق ق |
84 |
1M |
15 |
بد |
24 |
0.2 |
ق ق |
82 |
1M |
10 |
عالی |
26 |
0.2 |
ق ق |
100 |
1M |
10 |
معمولی |
23 |
0.3 |
ق ق |
77 |
1M |
10 |
بد |
21 |
0.3 |
ق ق |
70 |
1M |
5 |
عالی |
24 |
0.2 |
ق ق |
69 |
1M |
5 |
معمولی |
20 |
1.5 |
غ ق |
بعلت تاخیر بالا نیاز به محاسبه نبود |
در مشاهدات کلی جدول بالا کم کردن تعداد فریم تاثر بسزایی در ایجاد تاخیر در پردازش تصویر میکند همینطور کم کردن کیفیت تصویر تاثیر زیادی در کم شدن مصرف پردازنده خواهد داشت. از دست دادن زمان بیش از 1 ثانیه تاخیر برای نرم افزار پلاک خوان پارکینگ بسیار مهم است چرا که در حالت واقعی ما همیشه 1 ثانیه عقبتر از آنچه هستیم که در حال اتفاق افتادن است. بنابراین حالتهایی که بیش از 1 ثانیه تاخیر دارند از نظر ما مردود یا غیر قابل قبول (غ ق) خواهند بود.
در خصوص زمان لازم برای شناسایی پلاک نیز حالتهایی که بیش از 500 میلی ثانیه برای شناسایی پلاک زمان نیاز داشته باشند هم مردود و غیر قابل استفاده خواهند بود زیرا برای شناسایی یک پلاک حداقل باید برنامه پلاک خوان آنرا در 2 فریم مشاهده کند که چنانچه مجموع دو فریم بیش از 1 ثانیه باشد بازهم این حالت از نظر ما مردود خواهد بود.
-
پیدا کردن آستانه شناسایی پلاک در بهترین تنظیمات دوربین در حالت واقعی:
اکنون باید بدانیم که در حالت تست واقعی هرکدام از حالتها کدام حالت برای شناسایی پلاک مناسبتر خواهد بود. تحقیق دوم را مبنی بر فاصله شناسایی پلاک در کیفیتهای مختلف ایده آل در زاویه صفر درجه در روبروی پلاک و در روز انجام میدهیم.
در این تحقیق که با دوربین ذکر شده انجام شد در حالت زوم بر روی حداکثر و در حالت فیکس بر روی حداقل تنظیم گردید. نتایج بدست آمده مطابق جدول بشرح ذیر میباشد (دوربین در حالت فیکس در فاصله کانونی 3.6 میلیمتری و در حالت زوم در فاصله کانونی 12 میلیمتری قرار دارد):
ردیف |
رزولوشن |
تعداد فریم در ثانیه |
کیفیت |
آستانه شناسایی پلاک (متر) در حالت زوم |
آستانه شناسایی پلاک (متر) در حالت معمولی |
زمان شناسایی پلاک (میلی ثانیه) |
درصد مصرف پردازنده |
1 |
3M |
10 |
عالی |
23 |
8.5 |
2000 |
70 |
2 |
3M |
15 |
معمولی |
21 |
8 |
1200 |
68 |
3 |
3M |
10 |
بد |
19 |
7 |
720 |
61 |
4 |
2M |
15 |
عالی |
19 |
7 |
650 |
65 |
5 |
2M |
10 |
معمولی |
19 |
7 |
400 |
50 |
6 |
2M |
15 |
بد |
17 |
6.5 |
500 |
54 |
7 |
1M |
15 |
عالی |
12 |
4.5 |
240 |
37 |
8 |
1M |
15 |
معمولی |
12 |
4.5 |
170 |
33 |
9 |
1M |
15 |
بد |
11 |
4 |
170 |
23 |
نتیجه گیری:
باتوجه به مدت زمان سپری شده برای شناسایی پلاک و یکسان بودن فاصله آستانه شناسایی پلاک[3] تنظیم بودن رزولوشن بر روی 3 مگاپیکسل به صرفه نیست و لذا استفاده از دوربین 3 مگاپیکسل صرفا جهت داشتن لنز بهتر در شناسایی پلاک مناسب هستند، بنابراین ردیفهای 1 و2 و3 از لیست ما حذف خواهند شد.
در مقایسه 4 و5 با توجه به اینکه مورد 5 درصد مصرف سی پی یو کمتر با متراژ بالاتر شناسایی پلاک دارد پس مورد 5 نسبت به 4 بهتر و نیز در مقایسه مصرف پردازش و بهتر بودن متراژ شناسایی نسبت به مورد 6 بنابراین مورد 5 از همه گزینه ها در رزولوشن 2 مگا پیکسل بهتر خواهد بود.
در مقایسه کیفیت لنز دوربین 1 مگا پیکسل مورد 8 از 7 بهتر خواهد بود چرا که آستانه شناسایی پلاک هر دو یکسان میباشد اما مورد 8 درصد مصرف کمتری از پلاک را خواهد داشت، و در مقایسه مورد 8 و 9 با از دست دادن 1 متر از آستانه شناسایی پلاک 8 درصد از مصرف پردازنده خواهیم کاست ، پس میتوان نتیجه گرفت استفاده از گزینه 9 برای سیستمهای با سی پی یو ضعیفتر و گزینه 8 برای سی پی یو های قویتر مناسب خواهند بود.
اگر هدف از پلاک خوانی متراژهای دور دستتر باشد میتوانید از 2 مگا پیکسل گزینه 5 استفاده کنید، بنابراین با فیلتر کردن گزینها میتوانیم از جدول خصوصیات زیر برای تنظیم دوربین خود جهت پلاک خوان استفاده کنیم:
رزولوشن |
تعداد فریم در ثانیه |
کیفیت |
آستانه شناسایی پلاک (متر) در حالت زوم |
زمان شناسایی پلاک (میلی ثانیه) |
درصد مصرف پردازنده |
توضیحات |
2M |
10 |
معمولی |
19 |
400 |
50 |
بهترین حالت برای شناسایی پلاک از راه دور |
1M |
15 |
معمولی |
12 |
170 |
33 |
بهترین حالت برای شناسایی از راه متوسط با سی پی یو خوب |
1M |
15 |
بد |
11 |
170 |
23 |
بهترین حالت برای شناسایی از راه متوسط با سی پی یو ضعیف یا چند دوربینه |
-
جانمایی مناسب جهت نصب دوربین پلاک خوان:
مهمترین فاکتور در نصب دوربین پلاک خوان خودرو برای پارکینگها شناسایی آخرین محل توقف خودرو است که در پارکینگها جلوی کانکس ورودی یا خروجی جهت دریافت کارت یا قبض ورود به پارکینگ میباشد.
مهمترین فاکتور برای کنترل تردد نیز دانستن میانگین سرعت و موانع موجود برای شناسایی پلاک جلوی دوربین و پلاک میباشد تا بتوان حداکثر بهره وری را داشته باشیم. بعنوان مثال استفاده تنظیم دوربین بر روی 2 مگا پیکسل با توجه به حداقل زمان 400 میلی ثانیه برای شناسایی پلاک نیاز خواهیم داشت باید حداقل خودرو در زاویه دید در آستانه شناسایی 400 میلی ثانیه قرار گیرد، بنابراین فرضا اگر خودرویی با سرعت 50 کیلومتر در ساعت وارد پارکینگ شود سرعت آن حدود 14 متر در ثانیه خواهد بود و چون 14 متر کمتر از آستانه شناسایی دوربین است پس پلاک شناسایی خواهد شد، اما اگر خودرویی با سرعت 120 کیلومتر در ساعت وارد پارکینگ شود سرعتی در حدود 33 متر بر ثانیه خواهد داشت و شناسایی این خودرو در این حالت ممکن نیست!
همانطور که میدانیم نرم افزار پلاک خوان آنلاین ما چنانچه زاویه دید حداکثر 45 درجه با پلاک را داشته باشد میتواند پلاک را مشاهده کند و تشخیص دهد، این زاویه درمورد زاویه عمودی (در ارتفاع) نیز صادق خواهد بود اما هرچه این زاویه کمتر باشد درصد صحیح شناسایی پلاک بالاتر خواهد رفت زیرا همپوشانی های بعضی از اعداد و کلمات شبیه هم کمتر خواهد بود، بعنوان مثال فرض کنید عدد 3 را از زاویه 50 درجه مشاهده میکنید، دندانه سوم عدد 3 بر روی دندانه دوم همپوشانی شده و شبیه به 2 خوانده میشود! این همپوشانی باعث ایجاد شباهتهای زیادی میشوند مثل عدد 7 به 2 یا بلعکس، شباهت حرف “ک” به “ی” یا حرف “س” به “ص” لذا توصیه میشود زاویه نصب دوربینها را بین 0 تا 30 درجه تنظیم کنید تا بهترین شناسایی پلاک را از تصویر داشته باشید.
برای پیدا کردن زاویه پلاک با دوربین به عکس زیر توجه کنید:
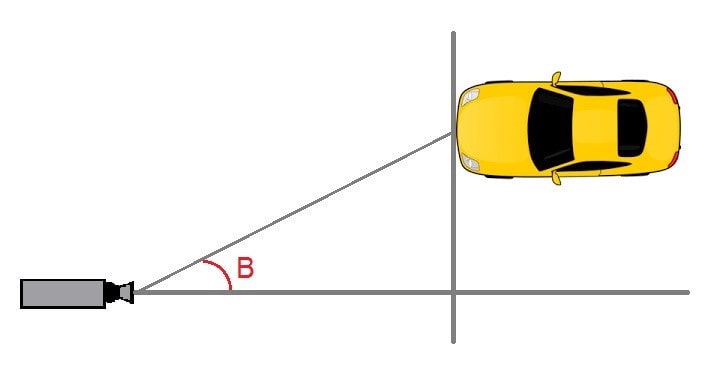
همانطور که ملاحظه میکنید زاویه B زاویه مورد بحث در پلاک خوانی میباشد که هر چه این زاویه بیشتر شود قرائت و تشخیص پلاک سختتر خواهد شد، این زاویه حداکثر باید بین 0 تا 45 درجه باشد.
در زیر یک نمونه جانمایی کانکس و دوربین را با هم مورد بررسی قرار میدهیم تا نمونه جانمایی دوربین را شرح دهیم:
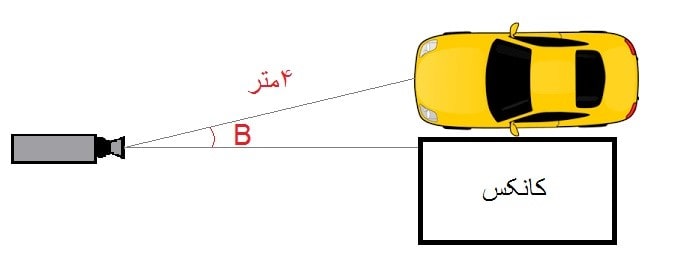
فرض کنیم که دوربین در فاصله 4 متری از کانکس قرار خواهد داشت، بنابراین زاویه با دوربین برابر با 27 درجه است که در محدوده مناسب تشخیص پلاک خواهد بود و با توجه به زاویه 30 درجه دید دوربین در حالت زوم دوربین حداکثر پوشش جهت خواندن پلاک را خواهد داشت.
اگر دوربین در فاصله کمتری قرار گیرد:
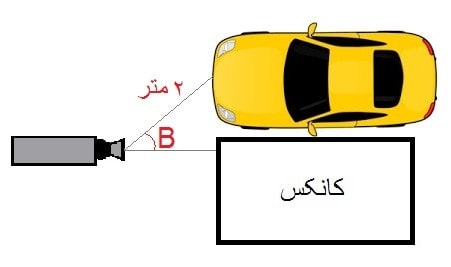
در این حالت زاویه دوربین حدود 50 درجه خواهد بود و شناسایی پلاک غیر ممکن میگردد! پس جانمایی دوربین در فاصله کمتر از 2.2 متر (زاویه بیش از 45 درجه) اشتباه خواهد بود.
میتوانید زاویه دوربین و پلاک را بصورت زیر محاسبه نمایید:
خودرویی را در آخرین نقطه از محل مورد نظر دریافت کارت یا قبض در جلوی کانکس متوقف کنید، نقطه ای که اکنون پلاک قرار دارد را نقطه A بنامید (نقطه وسط پلاک مد نظر است).
نقطه ای را که لنز دوربین قرار دارد نقطه B بنامید.
نقطه دلخواهی از کانکس را انتخاب کنید و آنرا نقطه C بنامید.
اکنون فاصله های A,B,C را با متر اندازه گیری کنید.
زاویه B با فرمول زیر محاسبه میشود:
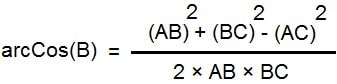
برای مثال زاویه زیر را محاسبه میکنیم:
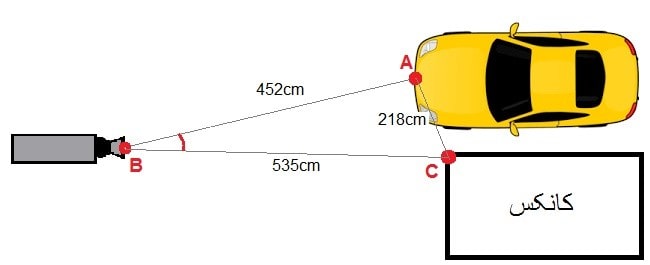
مطابق فرمول بالا اندازه ها را جایگذاری میکنیم:

بنابراین اندازه زاویه B برابر با 23.65 درجه است.
قطعا دانستن کلیه روابط مثلثاتی و نحوه محاسبه ArcCos زوایا کار دشواریست لذا ما مقدار زاویه هر درجه را محاسبه و در جدول زیر قرار داده ایم:
مقدار ArcCos |
0.65 |
0.71 |
0.77 |
0.82 |
0.87 |
0.91 |
0.94 |
0.97 |
0.98 |
0.99 |
1 |
زاویه بر حسب درجه |
50 |
45 |
40 |
35 |
30 |
25 |
20 |
15 |
10 |
5 |
0 |
در رابطه با جانمایی دوربین در ارتفاع نیز همین مسئله صادق است لذا ارتفاع های مناسب و فاصله های مناسب از پلاک در جانمایی دوربین پلاک خوان بصورت زیر خواهد بود:
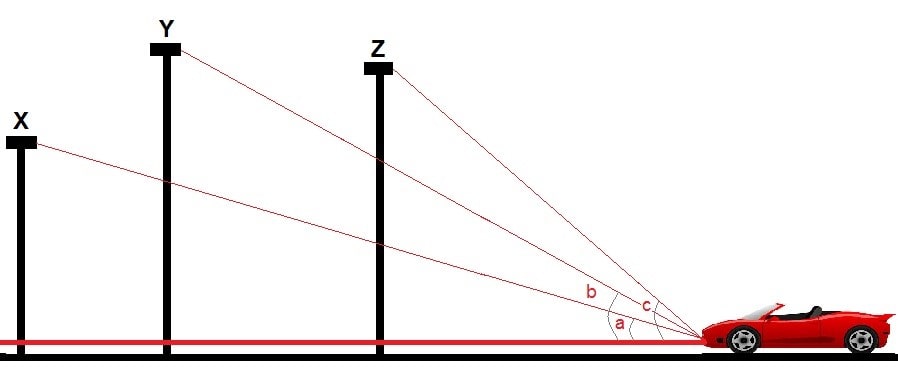
زاویه ارتفاع اول a که 15 درجه است و با دوربین x بر روی پایه نصب شده است. زاویه دومb که حدود 30 درجه و با دوربین Y که بر روی پایه نصب شده است و زاویه سوم c که حدود 45 درجه است و با دوربین Z بر روی پایه نصب شده است.
در جانمایی دوربین در ارتفاع هرچقدر زاویه به صفر نزدیکتر باشد نیز دقت تشخیص پلاک بالاتر خواهد رفت . ممکن است بر اساس محل پارکینگ جانمایی دوربین در حالتهای ایده آل را نداشته باشیم برای مثال در سیستمها کنترل تردد شهری ممکن است دوربین در ارتفاع 5 متری قرار گیرد لذا با توجه به زاویه ساخته شده فاصله دوربین از خودرو متغیر خواهد بود ؛ بعنوان مثال اگر دوربین در ارتفاع 5 متری باشد چنانچه زاویه 30 درجه باشد (مانند دوربین در پایه Y مطابق عکس) پلاک از دوربین تقریبا 8.5 متر خواهد بود و اگر بخواهیم فاصله از پلاک را کمتر در نظر بگیریم باید زاویه عمودی با پلاک را بیشتر کنیم مثلا در زاویه 45 درجه در ارتفاع 5 متری فاصله دوربین با پلاک تقریبا 5.5 متر خواهد بود.
در شکل زیر زاویه ها و ارتفاع های استاندارد مجاز نصب دوربین پلاک خوان برای زاویه های 15و30و45 درجه محاسبه شده است:
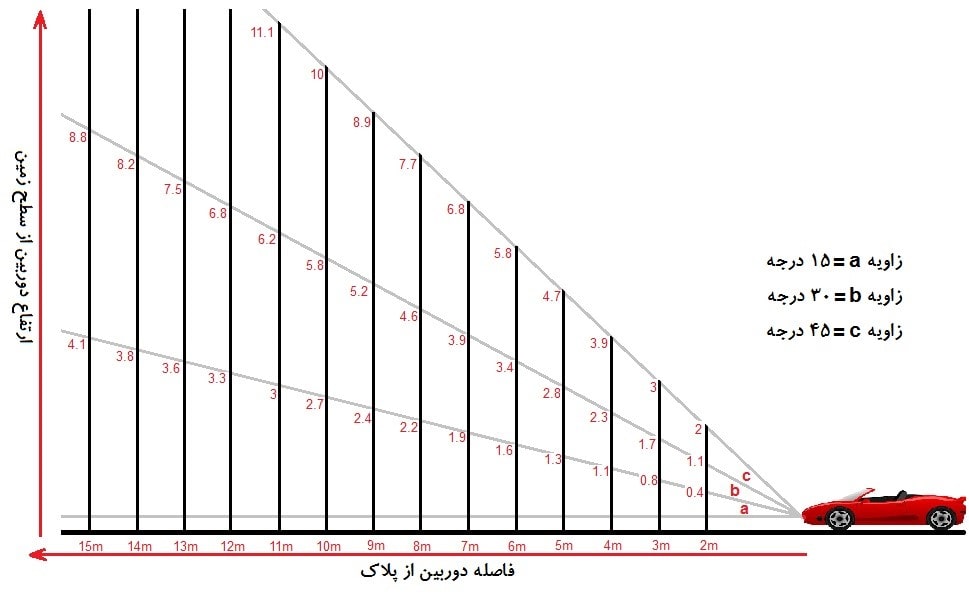
نکته مهم: اکثرا در پارکینگها راهبند در جلوی خودرو قرار دارد که این راهبند در ارتفاعهای متفاوت مانع از مشاهده پلاک توسط دوربین میگردند، لذا بهترین زاویه برای جانمایی دوربین در این پارکینگها زاویه صفر است زیرا این تنها حالتی است که دوربین مقابل پلاک بوده و از زیر بوم راهبند میتواند براحتی پلاک را مشاهده کند، بعضا تا فاصله 3 متری از راهبند در ارتفاع 80 سانتیمتری نیز میتوان پلاک را بدون نقطه کور مشاهده نمود.
چنانچه در پارکینگ خود از راهبند استفاده میکنید باتوجه به اینکه ارتفاعهای هرکدام از راهبندها با یکدیگر متفاوت است و نیز فواصل قرارگیری راهبند متغیر است نمیتوان معیار دقیقی برای پیدا کردن نقطه کور در نظر گرفت لذا در صورتیکه امکان جانمایی دوربین در زاویه صفر درجه در ارتفاع وجود ندارد میتوانید با توجه به مکانهای مجاز نصب در ارتفاع (زاویه کمتر از 45 درجه ) با توجه به محل نصب راهبند برای هر پارکینگ اختصاصی تعیین مکان شود. در عین حال ترجیح بر این است که دوربین در زاویه صفر درجه در ارتفاع (ارتفاع 40 تا 80 سانتیمتری زمین) نصب شود و زاویه افقی با پلاک بیشتر شود تا اینکه در ارتفاع باشد و زاویه افقی کم شود.
تا کنون در مورد دو نوع زاویه صحبت کردیم زاویه افقی (زاویه کناری پلاک) و زاویه عمودی (زاویه دوربین در ارتفاع از پلاک). اکنون این سوال مطرح میشود که آیا اگر هر دو زاویه در آستانه قرار بگیرند (هر دو زاویه 45 درجه باشند) بازهم قرائت پلاک ممکن است؟ آری، اما درصد صحت آن کم میشود برای آنکه مطمئن باشیم مکانی را که دوربین قرار میگیرد صحیح بوده و حتما پلاکها را صحیح قرائت میکند این نکته را مد نظر داشته باشید که حاصل جمع زوایای افقی و عمودی نباید از حداکثر 75 درجه تجاوز کند ، هرچه این عدد به صفر نزدیک باشد باشد شناسایی پلاک بهتری خواهیم داشت بنابراین در رابطه با زوایای افقی و عمودی این را بدانیم که هر زاویه افقی یا عمودی باید از 45 کمتر و حاصل جمع آنها نیز از 75 کمتر باشد.
کیان اکبرپور
درباره من :
هر روز سعی میکنم باگ هام و پیدا کنم ونسخه کم خطا تری از خودم به دنیا معرفی کنم...